
With the Tiger 6S, ROPA presented two new developments that automatically adjust the working depths of the harvesting attachment:
• R-Trim - automatic adjustment of the defoliator height
• R-Contour - automatic share depth adjustment of the individual rows at the RR lifting unit
Both systems adapt their working depth to the changing conditions in the beet crop throughout the field. The automatic systems react to different crown heights or to ground unevenness perpendicular to the direction of travel. The angle sensor at the scalper has been enhanced to include an additional measuring system for recording the ground contour directly at the beet rows.
How does it work?
A new powerful on-board computer on the lifting unit of the Tiger 6S reads all measured values within a split second and, with the aid of the newly developed software, changes the defoliator height or the lifting depth of the individual rows. The combination and interaction of both systems make the driver's work much easier and allows partly autonomous guiding of the lifter attachment. Topping losses due to changes in the condition of the crop are avoided without stress for the driver despite the reduction in the size of cut-off leaf stalks. This prevents not only the unnecessary pickup of soil by the lifting share and increased fuel consumption due to excessively deep lifting, but also root fracture of the beet if harvesting too shallow.
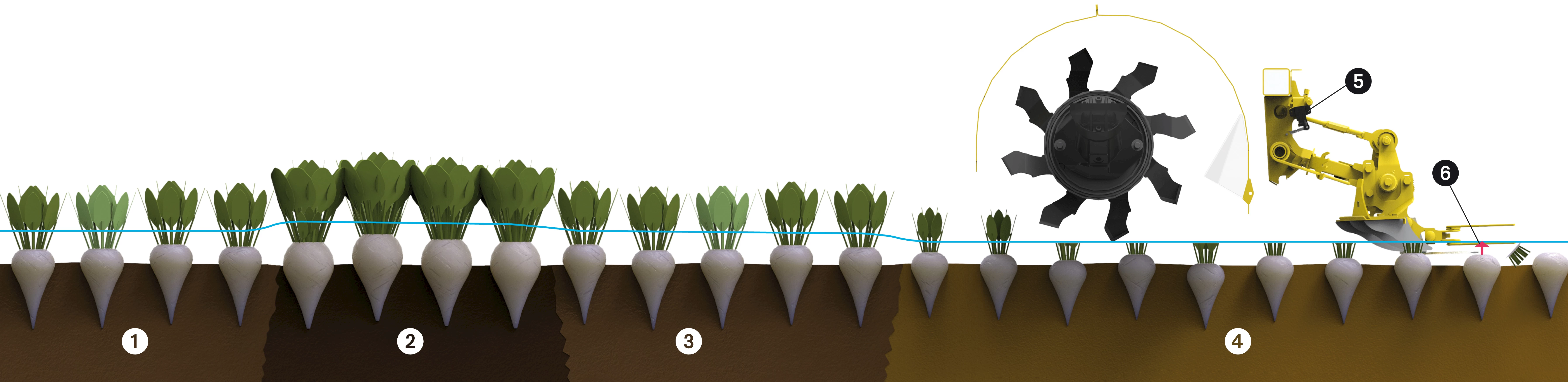
1. Normal sugar beets - medium crown height; 2. Large sugar beets - high crown height; 3. Normal sugar beets - medium crown height; 4. Small sugar beets - low crown height; 5. Angle transmitter; 6. Defined scalper height
The Micro-Topper comb detects the crown height of the topped beets. A height profile (blue line in the chart) is calculated from the average values of these crown heights. The height of the defoliator shaft is constantly adjusted to this profile. This prevents too intensive topping of the beet crowns, e.g. when the beet crop changes from small to large. Furthermore, too much leaves on the beets is avoided when the beet size changes from large to small.
How does it work?
The driver uses the menu to set the desired height of the defoliator shaft over the cutting height of the scalper flail (red arrow in the chart). This setting defines the average length of the leaves remaining on the beet after the defoliator knives. An angle sensor on each Micro-Topper records the crown height of each beet row. In the case of differences in the crop growth (e.g. dry areas) the activated R-Trim automatically corrects the height guide of the defoliator shaft depending on the highest beet.

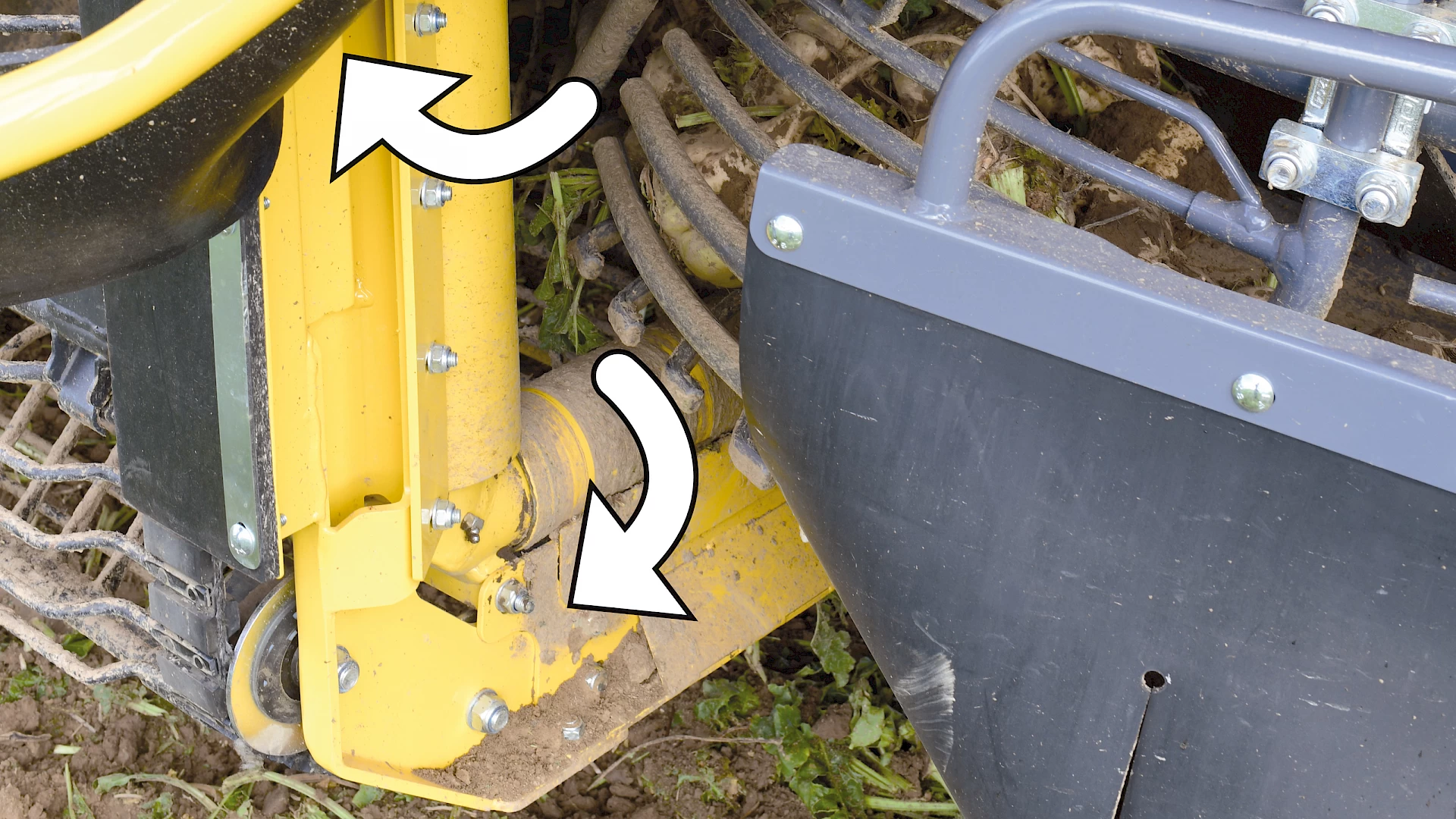
The machine operator uses the joystick on the operating console to set the lifting depth as required and thus defines how deep the lifter share will penetrate the soil. Ultrasonic sensors beside every beet row record the ground surface contour. Powerful on-board computers process the measured values and ensure that the lifting depth is maintained in accordance with the ground contour. Compared to the previous systems for automatic adjustment of single rows, this system has many advantages, particularly with higher growth in beet rows beside roads.
How does it work?
The driver activates the R-Contour (ground contour sensor system) on the terminal. Thus, the share depth adapts to the ground contours. The activated R-Contour prevents root fracture of the beet if harvesting too shallow or unnecessary pickup of soil if harvesting too deep. The share depth adjustment is displayed synchronously on the terminal.


Ultrasonic sensors beside very beet row record the ground surface contour and share depth is automatically adjusted
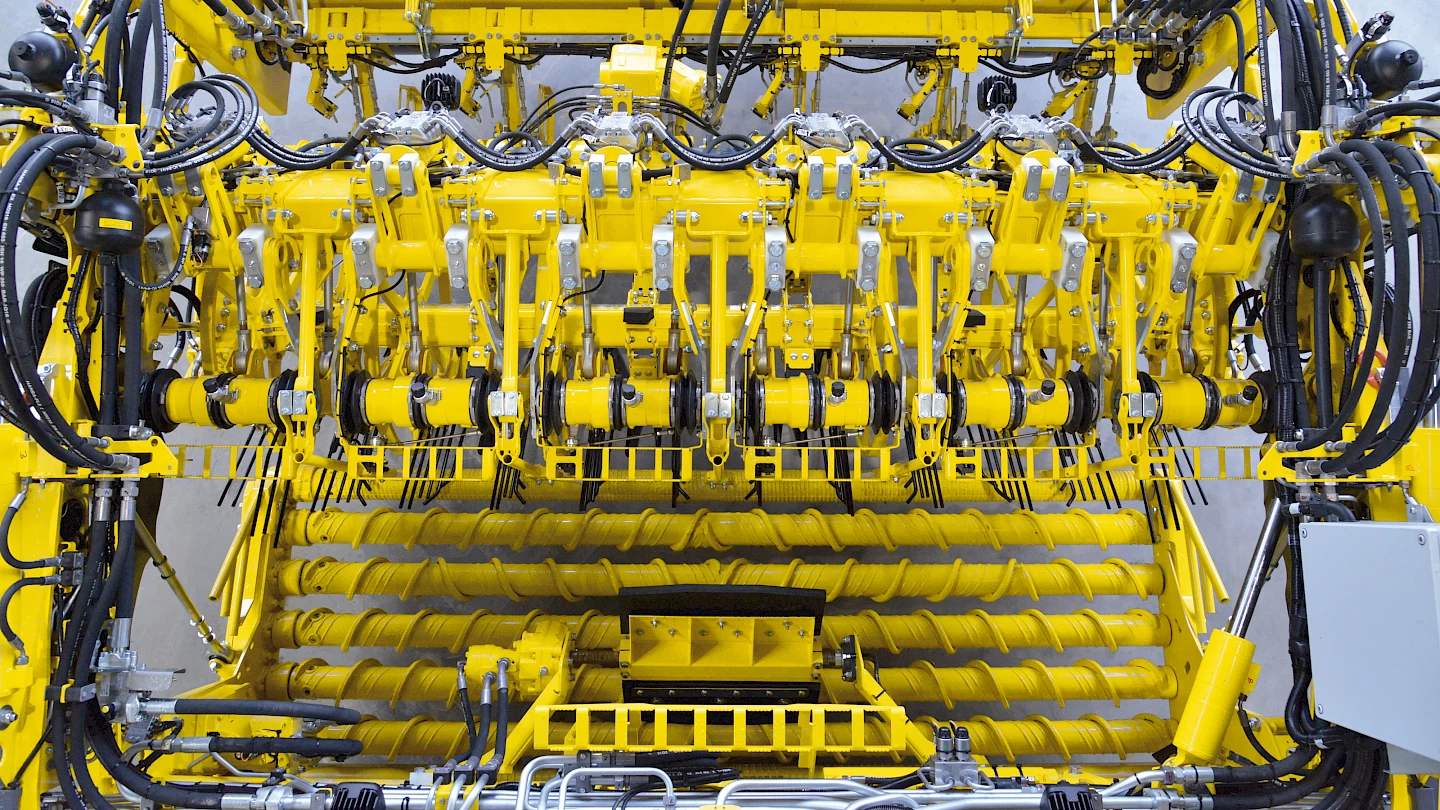
The RR lifting unit is equipped with counter-rotating oscillating shares, seven lifting rollers, completely maintenance-free hydraulic stone protection and single-row adjustment of the share depth. The 850 mm large depth-control wheels combined with the intelligent three-point suspension guarantee accurate depth control of the lifter. Maintenance costs are minimized with adjustable taper roller bearings in transmissions and the oscillating share drive.
With seven lifting rollers, welded as standard with extremely abrasion-resistant, carbide containing hard-coated wire "Ropa Screwtec". Simple, fast exchange of the lifting rollers for varying conditions (different diameters, outfeed, infeed, etc.)







The defoliator and the lifter assembly can be raised hydraulically up to 90° above the lifting unit for service (flails, scalper knives, lifting shares). It is raised from the cabin by pressing a button without requiring the driver to leave the cabin, or from the ground using the push buttons.

The diesel engine can be started and switched off by pushing a button on the lifter.

ROPA integral defoliator - standard model for normal harvesting conditions
Leaves from the beet crowns are mulched with robust defoliator knives and spread between the rows. This process spreads the beet leaves with all their nutrients evenly over the soil, forming the optimal basis for the subsequent cultivation for quick conversion of the green waste to humus. The integral defoliator is available with depth-control wheels (RIS) and mechanically folding leaf sensor or without depth-control wheels (RISU) with a hydraulically folding leaf sensor.
The comb of the Micro-Topper follows each beet head, adjusting the trimming gap to the size of the head, so that the beet is cut not too much and returns maximum yield. Nothing is lost, no sugar beet is trimmed too much, and the quality is better than ever. The intensity of the cut can be easily adjusted from the cabin. You may choose between topping and "shaving off" leaves only (micro-topping).


The hydraulically tensioned sieve conveyor efficiently transports the beets to the first strainer wheel. The portal axis enable maximum throughput without slowing the beet flow or damaging the beets. The driver can steplessly adjust the sieve conveyor speed and reverse it if necessary from the cabin. The beet flow monitoring prevents the beets from overflowing the machine. Three strainer wheels equipped with forged tines, which have improved speed adjustment (a separate pressure sensor for each strainer wheel), clean the beets with extreme efficiency and care. The offset carrier tines ensure fast forwarding even at low strainer wheel rotation speeds.


Offset strainer wheel tines

Agitator at the transition to the second strainer wheel (optional)

Cleaner on elevator rubber
Rotating transition tubes at the elevator infeed prevent accumulation of dirt in corner

Rotating transition tubes at the elevator infeed prevent accumulation of dirt underneath

The automatic bunker filling allows optimum traction under all harvest conditions by excellent weight distribution.

Two ultrasound sensors measure the load by totaling the bunker loads and save it in the order database.

The extra-long unloading conveyor pivots high on the machine, allowing for a shallower conveyor angle while driving alongside carts resulting in faster unload times. The unload conveyor features 3-foldable sections and a width of 2000mm allowing for easy and controlled unloading onto piles or trailers. Gentle polyurethane fingers guarantee high feeding capacity with short unloading times of less than 50 sec. with a full beet bunker holding approx. 43 m³. Unloading can be automated for either emptying onto piles or trailers significantly increasing ease of operations and allowing the operator to focus on monitoring other machine tasks.

With the new ergonomic control element on the left armrest, the discharge conveyor and bunker emptying can be controlled more easily and precisely.